I have always been really curious on how an Industrial Robotic Arm is made. Since this module allows students to make any project they would like to, I have decided to make a Mini Robotic Arm.
Since I am from the Diploma of Robotics and Mechatronics, I have some knowledge of making a 3D model as well as programming from scratch. However, I have never made an electrical schematic on my own. Therefore, I have decided to make a prototype to test whether my idea would or would not work.
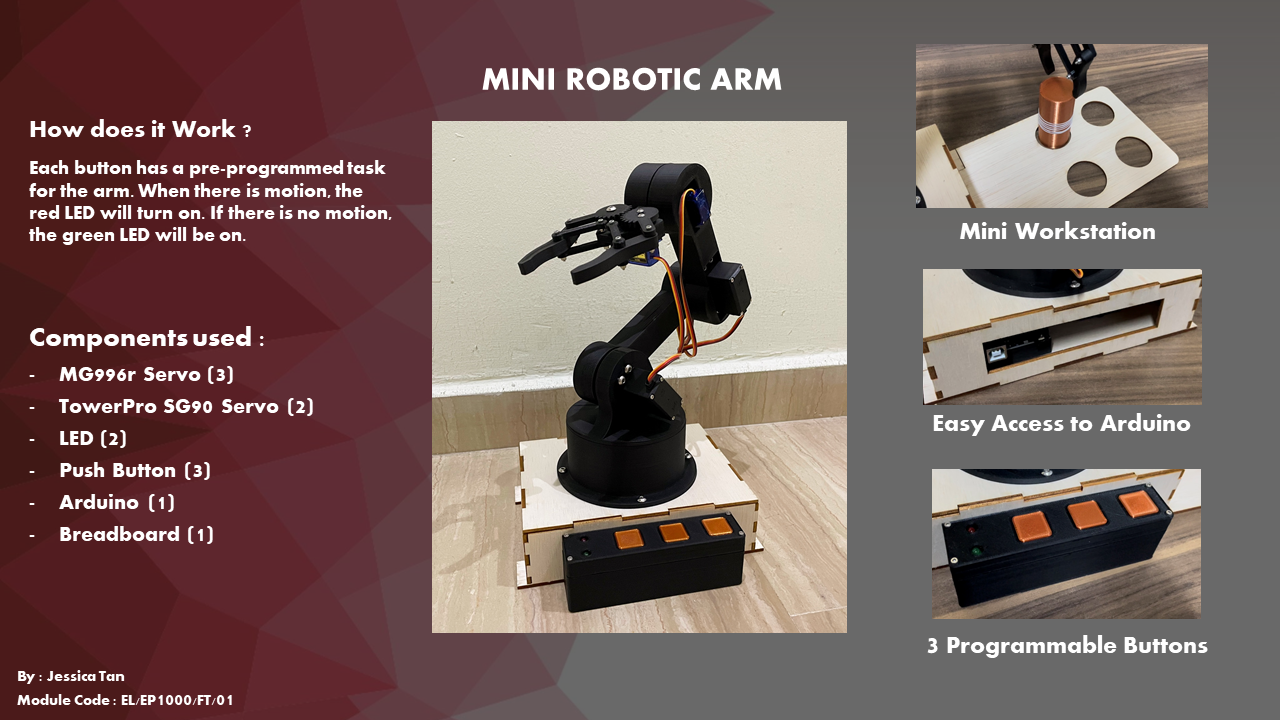
1. Arduino Uno (1)
2. Breadboard (1)
3. TowerPro SG90 Servo Motor (4)